 中文版
中文版 English
English
ZR模组在半导体芯片贴装行业的应用
Time:2021-07-01Frequency:17356 Author: Furuite在半导体设备行业,经常会遇到芯片的取放类的应用。由于芯片的高精密性,所以对在取放时的力度要求很高,取放力度不够芯片难以顺利吸取,力度过大容易造成芯片的损坏。而且伴随Z轴的取放一般还需要对芯片的角度进行调整,针对这一系列问题,ZR模组应运而生。
ZR模组可以在高速取放运动时提供精准的Z轴向旋转动作,独特的“软着陆”功能可以控制力量轻轻的触碰对象,可以避免在取放时损坏拾取对象。
一、Z轴力控
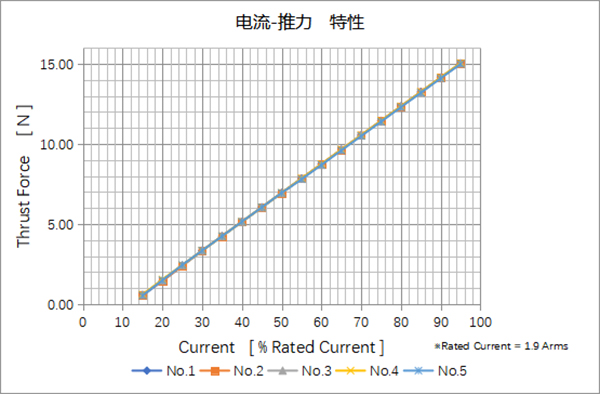
Z轴选用小推力系数无铁芯棒状直线电机,电流-推力比曲线近乎完美的直线。设定压力可低至1g,重复性小于0.5g。
Z轴的运动分为五个阶段:快速靠近、软着陆、压力保持、慢速脱离、快速返回。
● 快速靠近阶段:Z轴到达拾取对象上方后,在位置模式下以设置好的加速度和速度参数下快速运动至软着陆开始位置;
● 软着陆阶段:在软着陆开始位置切换至电流环,以程控的低力量接近对象,直到对象表面;
● 压力保持阶段:到达设定压力值后,电机保持恒动力输出,此过程通常用来等待上位机真空控制等动作;
● 慢速脱离阶段:Z轴以设置好的加速度和速度参数向上运动,保证拾取的稳定性,防止拾取对象脱落;
● 快速返回阶段:在位置模式下以设置好的加速度和速度参数下快速运动至设定目标;
二、R轴旋转
R轴采用高扭矩、小体积、高分辨率中空式DD马达,在芯片的取放阶段进行角度的微调,重复精度小于±3.6arcsec。
